

Cảm biến lực Kỹ thuật Số
Các cảm biến lực kỹ thuật số (Digital Loadcell) đều có bộ vi xử lý bên trong, đây là bộ phận xử lý tín hiệu của cảm biến lực. Mỗi cảm biến lực có một địa chỉ khác nhau, đầu cân đọc tín hiệu và giao tiếp với cảm biến lực thông qua địa chỉ này. Nó không chỉ cải thiện độ tin cậy của hệ thống cân, mà còn giải quyết dễ dàng các lỗi phức tạp, như là trọng lượng cân nhỏ hơn trọng lượng bì, các lỗi do độ võng của cơ khí gây ra,….
Quan trọng hơn, với độ chính xác cao và tốc độ chuyển đổi A/D cao và kỹ thuật bù số nội kỹ thuật số, cảm biến lực kỹ thuật số có hiệu suất làm việc hơn hẳn cảm biến lực tương tự.
So sánh công nghệ Kỹ thuật số và tương tự
1. Độ tin cậy cao, lõi điện tử được bảo vệ
Cảm biến lực tương tự được cung cấp nguồn bởi bộ chỉ thị (hay đầu cân), nên nguồn điện áp kích thích của cầu điện trở bằng với nguồn điện áp xuất của đầu cân. Trong bối cảnh ngành công nghiệp hiện nay, nó dễ dàng bị ảnh hưởng bởi các nguồn điện rò lớn giữa bộ chỉ thị số và cảm biến lực, mà kết quả là dữ liệu không ổn định, hay thậm chí làm cảm biến lực hỏng.
Cảm biến lực Kỹ thuật số sử dụng công nghệ hàn kín la-ze với khí bảo vệ đảm bảo an toàn mạch cho thiết bị. Cấp bảo vệ là IP68.
Với thiết kế mạch bảo vệ rò điện, nó hạn chế dòng rò từ nguồn kích thích của đầu cân. Điều này làm cho tín hiệu xuất ra từ cảm biến lực số được ổn định.
2. Cảnh báo khi có lỗi
Khi hệ thống cân Kỹ thuật số làm việc, đầu cân chỉ thị sẽ kiểm tra từng cảm biến lực số. Vì vậy, một khi có lỗi xảy ra, đầu cân sẽ tự động cảnh báo.
3. Giá trị trả về nhiều, độ chính xác cao
Cảm biến lực Kỹ thuật số kết hợp hoạt động với nhau trong suốt quá trình xử lý. Tín hiệu số xuất ra nhiều và độc lập cho từng giá trị lực đáp ứng, làm tăng độ phân giải. Vì vậy giá trị hiển thị trên đầu cân khá chính xác, không bị mất kg, tăng tính độc lập cho cảm biến lưc số, nếu 1 con lỗi cân vẫn có thể hoạt động.
4. Chỉnh góc dễ dàng
Các hệ thống cân sử dụng cảm biến lực kỹ thuật số rất dễ dàng để điều chỉnh lỗi góc. Như thể các đầu cân đọc từng Cảm biến lực trực tiếp vậy, chỉ cần đặt tải lên từng góc thôi. Đầu cân có thể tính toán hệ số lỗi mỗi cảm lức lực tại từng góc và điều chỉnh các lỗi tự động. Tất cả điều này giúp giảm những rắc rối của việc phải đi tải từng góc nhiều lần. Từ đó hiệu quả công việc được cải thiện.
Và khi thay đổi cảm biến lực mới, nó cũng không cần phải hiệu chỉnh lại. Khi các cảm biến lực kỹ thuật số thông qua chuẩn giao tiếp 485 đã được nhận dạng, ta chỉ cần nhập các thông số liên quan vào cảm biến lực mới thay đổi là hệ thống cân vận hành bình thường.
5. Cho phép khoảng cách lắp xa, tôc độ cao
Cảm biến lực Kỹ thuật số xuất tín hiệu là Kỹ thuật số. Vì thế nó không dễ bị can thiệp “không dễ chứ không phải không được by Kala Weight System”.
Quan trong hơn, tín hiệu được truyền theo lớp giao tiếp chủ-tớ hay công nghệ kiểm tra lỗi. Vì vậy, các tín hiệu được bảo vệ mạnh mẽ, tốc độ và khả năng kiểm tra, xác nhận khá tin cậy.
Mặc khác, nếu được mã hóa thì tín hiệu đó khó có thể bị đối tượng ngoài đọc được, ngăn chặn vấn đề gian lận.
6. Hệ thống cân Kỹ thuật số có lợi thế
Trong các ứng dụng hiện nay, cảm biến lực kỹ thuật số giúp giảm tải vấn đề tìm lỗi và vì vậy làm giảm chi phí bảo trì sữa chữa. Không cần hiệu chuẩn mỗi khi thay đổi thiết bị. Và các chẩn đoán được tự động, làm tăng độ ổn định và độ chính xác của hệ thống.
Lý thuyết chung
I. Sơ đồ cấu trúc

Bo mạch lõi điện tử của cảm biến lực hoạt động như sau:
Tín hiệu điện của cảm biến đến từ việc đo biến dạng, sau đó đến bộ phận khuếch đại. Chiều dài của tế bào cầu điện trở chỉ khoảng 8mm, với việc đảm bảo không có lỗi do việc dán và tác động điện từ của bề mặt.
Tín hiệu điện tương tự sau đó qua bộ chuyển đổi A/D. Bộ chuyển đổi A/D có 24 bits.
CPU trung tâm sẽ tính toán và bù trừ giá trị xuất ra từ bộ A/D. Với chức năng chính như sau:
Tín hiệu xuất theo chuẩn RS485 được điều khiển bởi CPU.
Xử lý chính xác điểm ZERO.
Xử lý tuyến tính.
Xử lý độ bù trừ nhiệt độ môi trường.
Xử lý về gia tốc trọng trường.
Xử lý bù đáp ứng trể.
Xử lý bù độ gãy.
Tự động về ZERO.
II. Sơ đồ làm việc
Ví dụ: Cảm biến lực số BTA-D 30t

Khi có tải 30 tấn tác dụng lên và được hiệu chuẩn đầy tải, giá trị trả về sẽ là 30,000. Sau khi được phân ranh giới có tải và không, tất cả giá trị sẽ đươc lưu lại trên cảm biến lực ít nhất 10 năm mà không bị mất.
III. Giá trị trả về của Cảm biến lực số là ISN
Ví dụ 1:
Cảm biến lực số BTA-D 30t, chịu tải tối đa là 30t. Tín hiệu xuất Zero là 0 ISN và tối đa là 30,000 ISN. Giá trị trọng lượng của 1 ISN là bao nhiều ?
30t = 30000 kg.
30000 kg / 30000 Div = 1.000000 kg/Div, 1 ISN = 1 kg.
Ví dụ 2:
Cảm biến lực số BTA-D 40t, chịu tải tối đa là 40t. Tín hiệu xuất Zero là 0 ISN và tối đa là 30,000 ISN. Giá trị trọng lượng của 1 ISN là bao nhiều ?
40 t = 40000 kg.
40000 kg / 30000 Div = 1.333333 kg/Div, 1 ISN = 1. 333333 kg.
Ví dụ 3:
Cảm biến lực SQC-100 Kg, chịu tải tối đa là 100Kg. Tín hiệu xuất Zero là 0 ISN và tối đa là 30,000 ISN. Giá trị trọng lượng của 1 ISN là bao nhiều ?
100 kg / 30000 Div = 0.003333 kg/Div, 1 ISN = 0.003333 kg hay 3.333 g.
Ví dụ 4:
Cảm biến lực BTA-60t, chịu tải tối đa là 60t.Tín hiệu xuất Zero là 0 ISN và tối đa là 30,000 ISN. Giá trị trọng lượng của 1 ISN là bao nhiều ?
60 t = 60,000 kg.
60,000 kg / 30,000 Div = 2.000000 kg/Div, 1 ISN = 2 kg.
IV. Phương thức đọc giá trị của đầu hiển thị
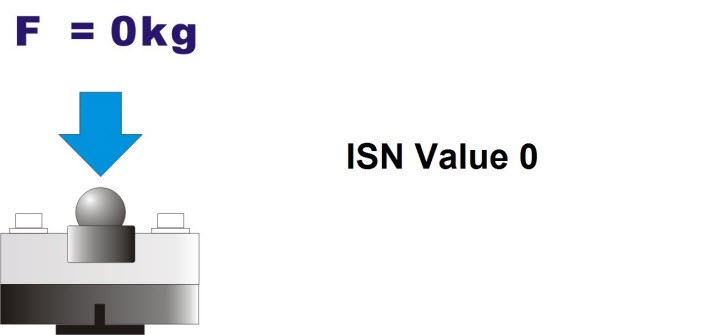
1. KHÔNG TẢI
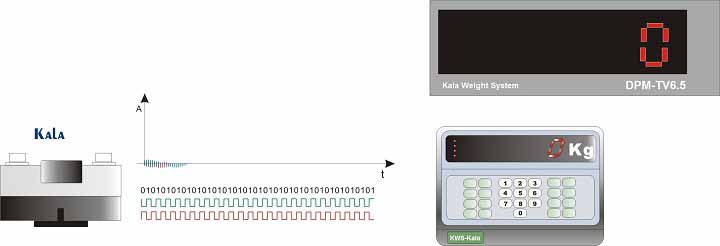
Khi không tải, dữ liệu từ cảm biến lực số có thể được đọc bằng đầu cân hoặc máy tính tải là 0. Khi lắp đặt tại nơi sử dụng, bình thường giá trị đó nhỏ hơn 50 khi không có tải.
2. CÓ TẢI
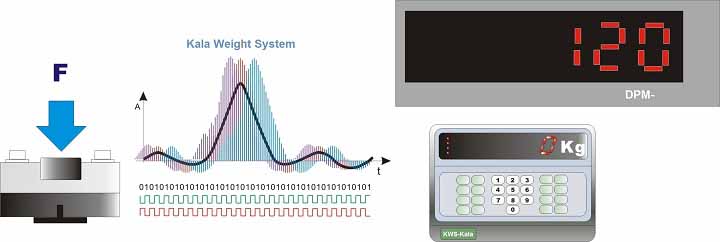
Khi có tải, cảm biến lực số sẽ đo lực và truyền dữ liệu về đầu cân hiển thị hoặc máy tính thông qua giao tiếp RS485.
Ví dụ: Cảm biến lực số BTA-D 30t, Không tải = 2 Div, Có tải = 1002 Div. Trọng lượng là bao nhiêu?
1. BTA-D 30t Đầy tải giá trị ISN là 30,000 Div;
2. Có tải – Không tải = 1002 Div – 2 Div = 1000 Div;
3. (1000Div / 30000Div) * 30000kg = 1000kg;
Trọng lượng là 1000kg.
V. Xử lý tín hiệu với 1 Cảm biến lực số
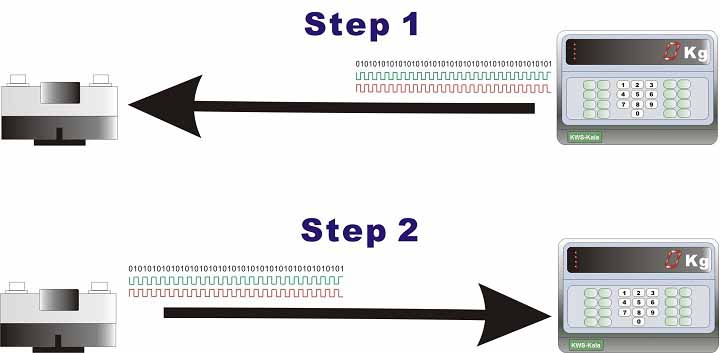
Đầu tiên, đầu cân sẽ gửi 1 yêu cầu được. Cảm biến lực số sẽ gửi trả về một dữ liệu đo. Tổng quá trình xử lý là rất ngắn, tổng thời gian khoảng 0.02 s.
VI. Xử lý tín hiệu với nhiều Cảm biến lực số

Cảm biến lực số sẽ có ít lỗi, chủ yếu lưu ý vấn đề kết nối, đặc biệt là lỗi địa chỉ.
Mỗi cảm biến lực số có một địa chỉ riêng biệt. Nếu máy tính hoặc đầu cân cần đọc dữ liệu của cảm biến lực số, nó phải gửi một yêu cầu đến địa chỉ tương ứng. Cũng giống như gọi điện vậy.
Trong điều kiện nếu thiết bị đầu cuối sai thứ tự yêu cầu hoặc có sự can thiệp để đúng thứ tự, song dữ liệu thay đổi, đừng lo các cảm biến lực số có định dạng giao thức chặt chẽ, khả năng lỗi trong lý thuyết là 10/1tỷ, và có mã kiểm tra an toàn để đảm bảo thông tin liên lạc đáng tin cậy.
Cảm biến lực kỹ thuật số sẽ không đáp ứng với yêu cầu sai, dù có được yêu cầu bao nhiêu đi nữa .
Trình tự làm việc
1. Gửi yêu cầu đọc Cảm biến lực Kỹ thuật số #1, Cảm biến lực Kỹ thuật số #1 trả dữ liệu trở lại.
2. Gửi yêu cầu đọc Cảm biến lực Kỹ thuật số #2, Cảm biến lực Kỹ thuật số #2 trả dữ liệu trở lại.
3. Gửi yêu cầu đọc Cảm biến lực Kỹ thuật số #3, Cảm biến lực Kỹ thuật số #3 trả dữ liệu trở lại.
4. Gửi yêu cầu đọc Cảm biến lực Kỹ thuật số #4, Cảm biến lực Kỹ thuật số #4 trả dữ liệu trở lại.
…….
Chu trình quá trình xử lý bình thường là rất ngắn, chỉ khoảng 0.02s
Nếu sau khi gửi, không có dữ liệu trở lại trong thời gian thiết lập. Nó cần phải gửi lại một yêu cầu. Nếu ngay lúc đó mà không có dữ liệu trở lại, nghĩa là dữ liệu của cảm biến lực số đó là bất thường. Ngay khi đó, đầu cân hoặc máy tính sẽ cảnh báo, cho đến khi dữ liệu được trả về là bình thường.
Nếu có thắc mắc gì, hãy liên hệ với chúng tôi để có cách giải quyết nhanh nhất
Hàng chính hãng, Chất lượng cao